

EasyGo Simulate 生产线规划仿真软件
本产品通过Tecnomatix官方软件提供的开 发接口环境进行工具开发,开发工具集成到软件 中,使用方式如同使用软件自带功能相同。
设备运动机构自动定义
减少繁琐过程
将旋转运行机构和直线运动机构定义操作简单化,减少操作不当所造成的错误,避免错选漏选 部件,提高机构定义可靠性,加快验证进度;
自动快速定义
只需输入简单的参数,程序自动识别其余部件,直接完成整个动作定义过程,包括部件分类、 动作创建、姿态创建、上下极限设置及颜色设置等,一步到位。
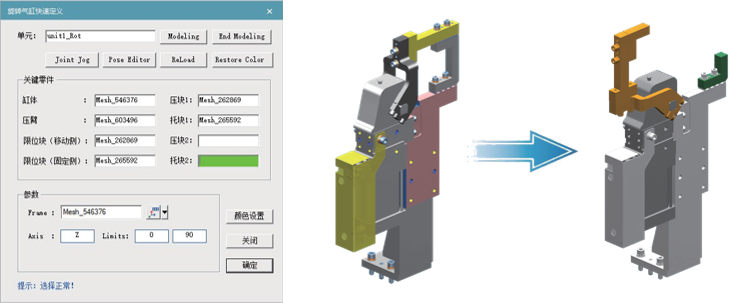
相比较于Process Simulate标准的功能【运动学编辑器】,当前开发功能,减少了手 动选择连杆单元的工作,也无需使用【创建关节】的命令来手动逐步操作。

基于当前运动机构定义的应用数据处理的阶段,配合自动拆分单元机构及数据批量转换的 开发功能,能显著提升仿真模型的数据处理速度,极大提升仿真数据处理的效率。
标准颜色快速着色
高效灵活
自定义配置标准颜色,导入导出预配置标准颜色;
快捷方便
单一简洁界面和简单操作,批量选取部件,快速完成 部件着色;

可以根据每个企业的标准进行定制化开发,形成规范的着色功能。
四连杆机构根据颜色标准快速创建连杆
基于标准颜色
在快速着色功能对部件完成着色后,利用颜色属性进行创建连杆;
快捷划分单元部件
根据颜色一键区分,划分为四连杆机构的四个不同连杆;

四连杆机构定义与旋转、直线运动机构有所不同,由于其机构的复杂性,不便于一键生成运动机 构,当前开发功能利用颜色标准化后的特性快速生成。基于定义好的标准颜色基础上对部件进行快速 分组,减少标准功能在选择连杆单元时重复选取的繁琐操作,可快速选择并将部件归类进连杆中。
机器人离线信号自动编程
配置信号标准
预配置现有品牌机器人程序特殊位置点的离线编程命令(OLP)标准,指定标准规则;
自动快速添加
对应特殊轨迹点,自动添加离线程序信号,如修磨位置、等待位置、抓手抓放位等。

随着机器人仿真标准化及规范化程度越来越高,越来越细致,很多重复性的添加离线编程命令(OLP) ,可以根据规则,通过开发功能,实现快速的一键写入。与Process Simulate标准的机器人离线编程命令 编辑功能的手动添加命令相比较,自动编程的方式,可以很大地减少人工手动添加和写入命令的工作量。
开发需求:
企业在软件应用过程中常感到软件使用过程中的痛点如:操作步骤复杂、需要重复操作 的步骤多、无法统一大家的操作过程(难以保证数据结果的一致性)等问题,这些可归结为 软件使用过程中的效率低和数据质量无法保证问题。 为解决以上问题,几乎所有的工业软件都开放二次开发接口,允许用户对软件进行二次 开发,以扩展功能、组合功能或定制新功能以满足自身需求。西门子Tecnomatix 软件即提 供完善成熟的二次开发环境,并每年在不同国家举办二次开发者大会,鼓励用户对软件功能 进行扩展以满足自身需求。
自动导出机器人信息
高效灵活
用于导出所选机器人的相关信息至Excel 表及自动生成相应数据的透视表;
快捷方便
解决了人工统计机器人信息时效率低、易出错问题,输出文档用于机器人清单核对;

导出信息包含:
所在线体、所在工位、机器人名称、控制器名称、机器人资源所在路径、机器人相对于世界原点坐标、 相对于当前工作坐标系坐标、机器人在home姿态时各轴轴值以及安装在机器人上的工具和工具资源所 在路径等。也可根据企业需求,增加或删减相关的导出信息。
自动创建机器人干涉检查
快速创建
机器人进行仿真验证前,用于快速自动地创建单个机器人干涉检查对;
高效准确
批量选取,解决人工逐个创建干涉检查效率低的问题,快速准确。

机器人路径快速检查
自定义检查规则
根据各品牌机器人的特性,预设置好奇异点、临界点、轴值转变过大等的检测规则;
快速一键检查
一键检查机器人仿真轨迹的每个点的姿态,快速便捷发现并排查错误;

通常在Process Simulate中对机器人轨迹进行检查,都是将机器人路径加载至路径编辑器 中进行仿真查看,逐个轨迹点进行确认,由于机器人路径点数量庞大,修改频繁,人工检查奇异 点与临界点几乎不可行,而奇异点和临界点的存在是很危险的,可能有误差就会导致机器人运行 与仿真差异很大。

机器人软限位批量设置
自定义检查规则
仿真验证前设置机器人软限位,保证机器人各运动轴有足够余量;
快速一键检查
达到一键设置所选机器人软件位功能,及检查机器人软限位设置是否合理。

解决软限位设置效率低问题,解决因工作量大,人工几乎不可能在项目过程中检查所有软限位设置正确性的问题,保证机器人仿真有足够余量。与Process Simulate标准的软限 位设置功能相比较,机器人软限位批量设置的开发功能可以按照预设值快速实现设置软限位 值,而标准功能只能逐个机器人进行手动设置。

设备单元自动拆分
减少繁琐过程
此功能为 Caita 软件的二次开发工具,用于快速将 Catia 内的数据进行拆分;
自动快速导出
只需选择对应的Catia树结构目录,即可一键导出cgr格式文件,以便对子层级的数据进行转换。

机器人离线程序自动导出
批量导出程序
用于Process Simulate 支持OLP离线编程品牌的机器人,对离线程序批量快速导出;
导出并检查程序
机器人离线程序将会批量导出并存储至相应路径,并弹出一个 Excel 表报告导出结果。

名称批量修改
高效灵活
批量快速且灵活地修改传感器信号名称,解决人工逐个修改传感器信号名称效率低、正确性无 法保证问题;
快捷方便
可以对资源、操作、信号等数据名称批量修改进行修改,利用Excel快速排序编辑的功能来优 化仿真命名;

客户评价:
通过EasyGo生产线规划仿真应用程序,实现扩展功能、组合功能或定制新功能,满足部门自身 需求,效率的提升很大的降低变更修改成本,根据每个功能的效率提升估计,每个二次开发 工具解决的单个问题的效率提升效果是极显著的,反映到整个项目的仿真过程中,估计能够 降低项目仿真总工时约5%。
——工装模具技术科 席平

快速生成和导入逻辑块
自定义逻辑
根据以往项目积累的智能组件逻辑功能,将其预配置好在安装程序中,实现快速生成和导入;
一键生成
可一键将企业定制的标准逻辑功能导入现有的资源模型中并创建连接电气信号;

其它应用程序功能
以上是基于EasyGo生产线规划仿真应用程序的一些常用功能介绍,通常会与设计软件Catia、NX进行接口对接,输入输出的一些图表结果则与Excel 进行交互。另外还有其它的一些二次开发功能如下表所示,在企业进行工艺规划及仿真的工作效率上也 有很大提升。
|
开发项 |
功能描述 |
|
导入标准PD结构树 |
PD创建项目时一键导入标准结构,使供应商PD数据结构统一 |
|
导入标准PD资源库 |
快速导入企业标准资源库,保证调用相同的库资源数据 |
|
设备批量切换姿态 |
将设备资源一键切换为打开、关闭或预设定好的状态 |
|
从Catia导入焊点 |
读取已打开的Catia焊点数据并导入PD,建立制造特征库 |
|
导出插枪图至Catia |
PS中焊枪的打焊接姿态批量快速导入至Catia中 |
案例分析
东风日产乘用车公司,其工程部门-新车准备技术科,需对生产线的仿真模型进行数据处理 和验证,该部门已运用Tecnomatix Process Simulate生产线仿真软件进行生产线数字化仿 真验证,在导入EasyGo PDPS二次开发功能插件后,迅速实现了标准化、快速化的仿真, 大幅度减少人为错误,减少繁琐操作,降低工作强度,显著缩短项目实施周期。
|
主要开发功能 |
使用前状态 |
使用后状态 |
提升效率 |
|
运动机构定义 |
单个资源逐一编辑,重复操作,耗时费力 |
一键定义生成机构 |
200% |
|
机器人轨迹检查 |
手动检查,逐条路径运行查看及导出数据 |
快速检查批量导出 |
500% |
|
标准颜色着色 |
重复对应设备对象着色,繁琐低效 |
标准化快速着色 |
100% |
|
机构自动拆分 |
逐个手动导出,重复低效,漏选错选 |
一键自动处理导出 |
300% |


